【周刊客服】

1429866508
智能的车+聪明的路,自动驾驶如何从单车智能转向协同智能
2021/07/01

自动驾驶技术要实现规模化商业落地,除了智能的车,还需要“聪明的路”。
目前自动驾驶存在单车智能自动驾驶(Autonomous Driving,AD)和车路协同自动驾驶(Vehicle-Infrastructure Cooperated Autonomous Driving,VICDA)两种技术路线。
在当下自动驾驶正在从关键技术研究、局部先导示范应用,走向全面商业化落地应用的过程中,仅依靠智能的车,也就是单车智能,仍然面临高成本、效率低、难以大规模复制推广等挑战。
有业内人士透露,Waymo平均一台自动驾驶车辆的成本就是40万美元左右,1000台就是4亿美元,这还只是车辆硬件成本。此外,单独一辆智能车即便搭载了足够多的传感器,在感知周边车辆和环境上也是有限的。
清华大学智能产业研究院(AIR)与百度Apollo近日共同推出的全球首份车路协同技术创新白皮书《面向自动驾驶的车路协同关键技术与展望》(以下称“白皮书”)指出,自动驾驶的规模化落地一定需要车路协同。
车路协同是单车智能的高级发展形式,能让自动驾驶行车更安全、行驶范围更广泛、落地更经济。车路协同像是路灯,而单车智能就像车灯,在两者协同作用下,自动驾驶规模化商业落地门槛能够大大降低。
据百度智能交通产品研发总经理陶吉介绍,车路协同自动驾驶在安全性、运行设计范围(ODD)和经济性上都有不可比拟的核心优势。
首先,基于车路协同的预期功能(SOTIF)能提升自动驾驶安全。单车智能的感知、预测能力在极端天气、不利照明、物体遮挡等情况下面临严峻挑战,而车路协同可弥补车端感知不足,有效扩大单车智能的安全范围。
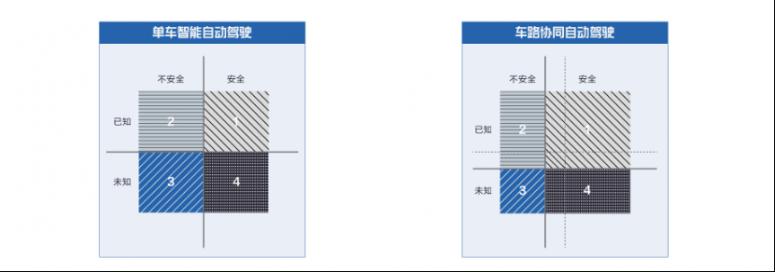
其次,车路协同能够扩展自动驾驶ODD(车辆运行设计域)。一般而言,受天气、行驶区域、时段、速度等因素限制,单车智能能够感知和应对的驾驶场景有限,而路侧的协同感知能够扩展车辆的感知范围、能力和场景,从而扩展单车的运行设计域(ODD),进一步提升自动驾驶的点到点能力。
此外,在系统配置上,单车智能除了要投入高昂传感器、算力设备之外,还需要一套等效的冗余子系统。而车路协同提供的路侧设备感知冗余,不仅复用率高避免重复建设,还能实现成本分摊。因此,在同等自动驾驶安全前提下,车路协同可以大范围实施部署,促进自动驾驶规模商业化的早日实现。
考虑到当下汽车智能化水平不一,对智能道路的要求也存在较大差异,清华大学智能产业研究院与百度Apollo在白皮书中对国内道路现状进行了智能化分级,将道路智能化水平分为C0-C5级6个等级。道路智能化等级越高,对车辆智能化要求也越低,覆盖的智能汽车等级范围也越广。
车路协同是自动驾驶规模商业化落地的必然趋势,车路协同也是智慧园区、智慧公交、智慧城市在内的智慧交通解决方案的重要组成部分。近期工信部表示,要着力打造“单车智能+网联赋能”中国方案,加速智能网联汽车产业化的发展进程。
此前5月14日,清华大学智能产业研究院(AIR)与百度Apollo也联合发布了“全球唯一纯路侧感知实现L4自动驾驶”的车路协同技术——Apollo Air计划,共同探索车路协同技术无人区。在北京亦庄、广州黄埔等城市地区的指导下,百度Apollo也在利用车路协同开展自动驾驶规模化商业落地的测试验证和示范运营。

